Deep Learning and Autonomous Driving
Courses
(Toronto) CSC2541: Visual Perception for Autonomous Driving, Winter 2016
(MIT) 6.S094: Deep Learning for Self-Driving Cars
- homepage: http://selfdrivingcars.mit.edu/
- github: https://github.com/lexfridman/deepcars
- youtube: https://www.youtube.com/playlist?list=PLrAXtmErZgOeiKm4sgNOknGvNjby9efdf
- mirror: https://pan.baidu.com/s/1boLRFaB
How to Land An Autonomous Vehicle Job: Coursework
Papers
An Empirical Evaluation of Deep Learning on Highway Driving
- arxiv: http://arxiv.org/abs/1504.01716
- github: https://github.com/brodyh/caffe
Real-time Joint Object Detection and Semantic Segmentation Network for Automated Driving
- intro: NeurIPS 2018 Workshop on Machine Learning on the Phone and other Consumer Devices (MLPCD 2)
- arxiv: https://arxiv.org/abs/1901.03912
Optical Flow augmented Semantic Segmentation networks for Automated Driving
- intro: VISAPP 2019 Oral
- arxiv: https://arxiv.org/abs/1901.07355
AuxNet: Auxiliary tasks enhanced Semantic Segmentation for Automated Driving
- intro: Short Paper for a poster presentation at VISAPP 2019
- arxiv: https://arxiv.org/abs/1901.05808
Design of Real-time Semantic Segmentation Decoder for Automated Driving
- intro: VISAPP 2019
- arxiv: https://arxiv.org/abs/1901.06580
Hierarchical Multi-task Deep Neural Network Architecture for End-to-End Driving
https://arxiv.org/abs/1902.03466
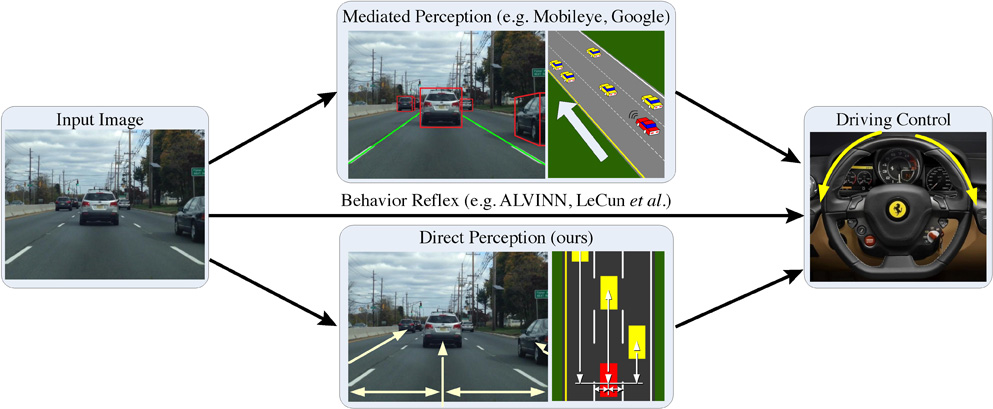
DeepDriving
DeepDriving: Learning Affordance for Direct Perception in Autonomous Driving
- project page: http://deepdriving.cs.princeton.edu/
- paper: http://deepdriving.cs.princeton.edu/paper.pdf
- code: http://deepdriving.cs.princeton.edu/DeepDriving.zip
End to End Learning for Self-Driving Cars
- intro: NVIDIA DevBox and Torch 7, 30 FPS
- arxiv: http://arxiv.org/abs/1604.07316
- blog: https://devblogs.nvidia.com/parallelforall/deep-learning-self-driving-cars/
- demo: https://www.youtube.com/watch?v=NJU9ULQUwng&feature=youtu.be
- github: https://github.com/SullyChen/Nvidia-Autopilot-TensorFlow
End-to-End Deep Learning for Self-Driving Cars

Can we unify monocular detectors for autonomous driving by using the pixel-wise semantic segmentation of CNNs?
BRAIN4CARS: Cabin Sensing for Safe and Personalized Driving
Brain4Cars: Sensory-Fusion Recurrent Neural Models for Driver Activity Anticipation
Brain4Cars: Car That Knows Before You Do via Sensory-Fusion Deep Learning Architecture
Car that Knows Before You Do: Anticipating Maneuvers via Learning Temporal Driving Models

Recurrent Neural Networks for Driver Activity Anticipation via Sensory-Fusion Architecture

- project page: http://www.brain4cars.com/
- arxiv: http://arxiv.org/abs/1509.05016
- github: https://github.com/asheshjain399/RNNexp
Long-term Planning by Short-term Prediction
Learning a Driving Simulator
- introo: by hacker Geohot
- project page: http://research.comma.ai/
- arxiv: http://arxiv.org/abs/1608.01230
- paper: https://github.com/commaai/research/blob/master/paper/commalds.pdf
- github: https://github.com/commaai/research
Comma.ai open-sources the data it used for its first successful driverless trips
Autonomous driving challenge: To Infer the property of a dynamic object based on its motion pattern using recurrent neural network
Safe, Multi-Agent, Reinforcement Learning for Autonomous Driving
Learning from Maps: Visual Common Sense for Autonomous Driving
SAD-GAN: Synthetic Autonomous Driving using Generative Adversarial Networks
- intro: Accepted at the Deep Learning for Action and Interaction Workshop, 30th Conference on Neural Information Processing Systems (NIPS 2016)
- arxiv: https://arxiv.org/abs/1611.08788
MultiNet: Real-time Joint Semantic Reasoning for Autonomous Driving
- intro: first place on Kitti Road Segmentation. joint classification, detection and semantic segmentation via a unified architecture, less than 100 ms to perform all tasks
- arxiv: https://arxiv.org/abs/1612.07695
- github: https://github.com/MarvinTeichmann/MultiNet
Interpretable Learning for Self-Driving Cars by Visualizing Causal Attention
- intro: UC Berkeley
- arxiv: https://arxiv.org/abs/1703.10631
Virtual to Real Reinforcement Learning for Autonomous Driving
- intro: Shanghai Jiao Tong University & UC Berkeley & Tsinghua University
- arxiv: https://arxiv.org/abs/1704.03952
Computer Vision for Autonomous Vehicles: Problems, Datasets and State-of-the-Art
- homepage: http://www.cvlibs.net/projects/autonomous_vision_survey/
- arxiv: https://arxiv.org/abs/1704.05519
Deep Reinforcement Learning framework for Autonomous Driving
https://arxiv.org/abs/1704.02532
Systematic Testing of Convolutional Neural Networks for Autonomous Driving
https://arxiv.org/abs/1708.03309
MODNet: Moving Object Detection Network with Motion and Appearance for Autonomous Driving
https://arxiv.org/abs/1709.04821
CFENet: An Accurate and Efficient Single-Shot Object Detector for Autonomous Driving
- intro: CVPR 2018 Workshop of Autonomous Driving (WAD)
- arxiv: https://arxiv.org/abs/1806.09790
LaneNet: Real-Time Lane Detection Networks for Autonomous Driving
- intro: Duke University & Horizon Robotics, Inc.
- arxiv: https://arxiv.org/abs/1807.01726
Learning End-to-end Autonomous Driving using Guided Auxiliary Supervision
https://arxiv.org/abs/1808.10393
Rethinking Self-driving: Multi-task Knowledge for Better Generalization and Accident Explanation Ability
- intro: Waseda University
- arxiv: https://arxiv.org/abs/1809.11100
- demo: https://www.youtube.com/watch?v=N7ePnnZZwdE
Pixel and Feature Level Based Domain Adaption for Object Detection in Autonomous Driving
https://arxiv.org/abs/1810.00345
Multi-task Learning with Attention for End-to-end Autonomous Driving
- intro: CVPR 2021 Workshop on Autonomous Driving
- arxiv: https://arxiv.org/abs/2104.10753
MP3: A Unified Model to Map, Perceive, Predict and Plan
- intro: Uber ATG & University of Toronto
- arxiv: https://arxiv.org/abs/2101.06806
Level 2 Autonomous Driving on a Single Device: Diving into the Devils of Openpilot
- intro: Shanghai AI Laboratory & Shanghai Jiao Tong University & UCSD & SenseTime
- arxiv: https://arxiv.org/abs/2206.08176
- github: https://github.com/OpenPerceptionX/Openpilot-Deepdive
Real-time Full-stack Traffic Scene Perception for Autonomous Driving with Roadside Cameras
- intro: ICRA 2022
- intro: University of Michigan & Ford Motor Company
- arxiv: https://arxiv.org/abs/2206.09770
ST-P3: End-to-end Vision-based Autonomous Driving via Spatial-Temporal Feature Learning
- intro: ECCV 2022
- intro: Shanghai Jiao Tong University & Shanghai AI Laboratory & The University of California & JD Explore Academy
- arxiv: https://arxiv.org/abs/2207.07601
- github: https://github.com/OpenPerceptionX/ST-P3
Effective Adaptation in Multi-Task Co-Training for Unified Autonomous Driving
- intro: NeurIPS 2022
- intro: Shenzhen Campus of Sun Yat-Sen University & Huawei Noah’s Ark Lab
- arxiv: https://arxiv.org/abs/2209.08953
Planning-oriented Autonomous Driving
- intro: CVPR 2023 best paper
- intro: Shanghai AI Laboratory, Wuhan University, SenseTime Research
- project page: https://opendrivelab.github.io/UniAD/
- arxiv: https://arxiv.org/abs/2212.10156
- github: https://github.com/OpenDriveLab/UniAD
Projects
Caffe-Autopilot: Car autopilot software that uses C++, BVLC Caffe, OpenCV, and SFML
Self Driving Car Demo
- intro; A project that trains a virtual car to how to move an object around a screen (drive itself) without running into obstacles using a type of reinforcement learning called Q-Learning
- github: https://github.com/llSourcell/Self-Driving-Car-Demo/
Autoware: Open-source software for urban autonomous driving
- github: https://github.com/CPFL/Autoware
Open Sourcing 223GB of Driving Data
- homepage: https://udacity.com/self-driving-car
- blog: https://medium.com/udacity/open-sourcing-223gb-of-mountain-view-driving-data-f6b5593fbfa5#.q8nk5bfpp
- github: https://github.com/udacity/self-driving-car
Machine Learning for RC Cars
Self Driving (Toy) Ferrari
Lane Finding Project for Self-Driving Car ND
Instructions on how to get your development environment ready for Udacity Self Driving Car (SDC) Challenges
DeepDrive: self-driving car AI
- intro: Caffe Model / Dataset / Tips and Tricks
- homepage: http://deepdrive.io/
DeepDrive setup: Run a self-driving car simulator from the comfort of your own PC
DeepTesla: End-to-End Learning from Human and Autopilot Driving
http://selfdrivingcars.mit.edu/deeptesla/
DeepPicar: A Low-cost Deep Neural Network-based Autonomous Car
Autonomous Driving in Reality with Reinforcement Learning and Image Translation
- intro: Shanghai Jiao Tong University
- arxiv: https://arxiv.org/abs/1801.05299
End-to-end Multi-Modal Multi-Task Vehicle Control for Self-Driving Cars with Visual Perception
https://arxiv.org/abs/1801.06734
Blogs
Self-driving cars: How far away are we REALLY from autonomous cars?(7 Aug 2015)
http://www.alphr.com/cars/1001329/self-driving-cars-how-far-away-are-we-really-from-autonomous-cars
Practice makes perfect: Driverless cars will learn from their mistakes(9 Oct 2015)
Eyes on the Road: How Autonomous Cars Understand What They’re Seeing
Human-in-the-loop deep learning will help drive autonomous cars

http://venturebeat.com/2016/06/25/human-in-the-loop-deep-learning-will-help-drive-autonomous-cars/
Using reinforcement learning in Python to teach a virtual car to avoid obstacles
- part 1: https://medium.com/@harvitronix/using-reinforcement-learning-in-python-to-teach-a-virtual-car-to-avoid-obstacles-6e782cc7d4c6#.rneyuerga
- part 2: https://medium.com/@harvitronix/reinforcement-learning-in-python-to-teach-a-virtual-car-to-avoid-obstacles-part-2-93e614fcd238#.1pt1lli4c
- part 3: https://medium.com/@harvitronix/reinforcement-learning-in-python-to-teach-an-rc-car-to-avoid-obstacles-part-3-a1d063ac962f#.jwzm2v1r4
- github: https://github.com/harvitronix/reinforcement-learning-car
Autonomous RC car using Raspberry Pi and Neural Networks
- blog: http://www.multunus.com/blog/2016/07/autonomous-rc-car-using-raspberry-pi-and-neural-networks/
- github: https://github.com/multunus/autonomous-rc-car
The Road Ahead: Autonomous Vehicles Startup Ecosystem
Deep Driving - A revolutionary AI technique is about to transform the self-driving car
https://www.technologyreview.com/s/602600/deep-driving/
Visualizations for regressing wheel steering angles in self driving cars with Keras
- blog: http://jacobcv.blogspot.jp/2016/10/visualizations-for-regressing-wheel.html
- github: https://github.com/jacobgil/keras-steering-angle-visualizations
